–∞) —Н—В–Њ –≤–µ—Б—М –Є–Љ–њ—Г–ї—М—Б, –µ–≥–Њ –і–Њ—Б—В–∞—В–Њ—З–љ–Њ —З—В–Њ–±—Л –њ—А–Є–і—В–Є –Є–Ј –њ–Њ–ї–Њ–і–µ–љ–Є—П 1-2 –≤ –њ–Њ–ї–Њ–ґ–µ–љ–Є–µ 3-4. –Т –Ј–∞–Љ–µ–љ –љ–µ–≥–Њ –Ї–Њ–љ–µ—З–љ–Њ –љ—Г–ґ–љ–∞ –≥–∞—А–Љ–Њ–љ–Є–Ї–∞ –Ї–∞–Ї –љ–∞ —А–Є—Б—Г–љ–Ї–µ.
–±) –≤–µ—А–љ–Њ
–≤) –≤–µ—А–љ–Њ
–≥) –Є—Б–њ–Њ–ї—М–Ј—Г–µ—В—Б—П —В–Њ–ї—М–Ї–Њ —А–Њ–і–љ–Њ–є –і–∞—В—З–Є–Ї
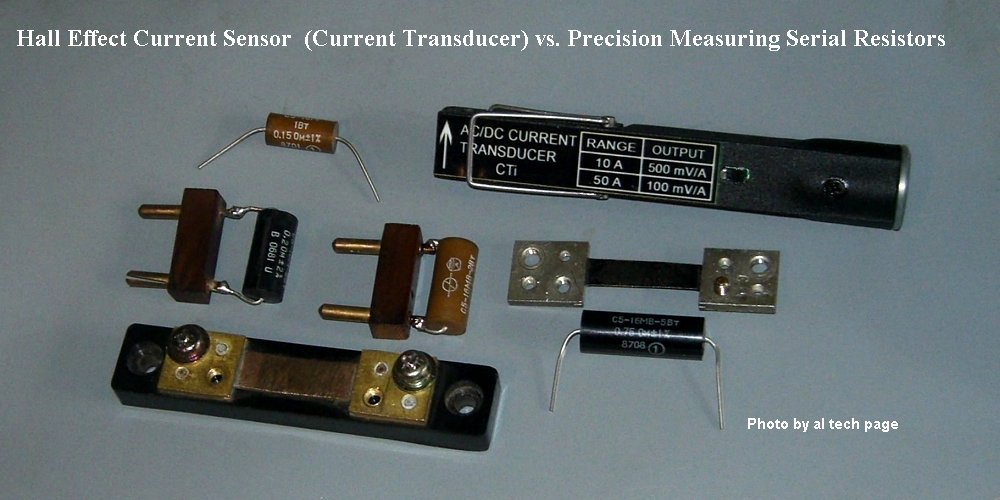
–і) –Њ—Б—Ж–Є–ї–ї–Њ–≥—А–∞–Љ–Љ—Г —В–Њ–Ї–∞ –љ–µ —Б–і–µ–ї–∞—О, –∞ —Б –і—А–∞–є–≤–µ—А–∞ –њ—А–Є –Є–Ј–Љ–µ–љ–µ–љ–Є–Є —Б–Ї–Њ—А–Њ—Б—В–Є —Б–љ–Є–Љ—Г –і–∞–љ–љ—Л–µ –њ–Њ —В–Њ–Ї—Г (–≤ —Б—А–µ–і–љ–µ–Љ 12-15–Р)
–µ) –Э–∞–Ј–љ–∞—З–µ–љ–Є–µ –і—А–∞–є–≤–µ—А–∞ - —А–µ–≥—Г–ї–Є—А–Њ–≤–∞–љ–Є–Є–µ —Б–Ї–Њ—А–Њ—Б—В–Є –≤—А–∞—Й–µ–љ–Є—П
–Є –Ї–∞–Ї —Б–ї–µ–і—Б—В–≤–Є–µ, —Г–њ—А–∞–≤–ї–µ–љ–Є–µ –њ–Њ–ї–Њ–ґ–µ–љ–Є–µ–Љ –≤–∞–ї–∞ –Љ–Њ—В–Њ—А–∞ —Н–ї. –њ—А–Є–≤–Њ–і–∞?
–ґ) —Ж–µ–ї—М –њ—А–Є–Љ–µ–љ–Є—В—М –і–∞–љ–љ—Л–є –∞–Ї—В—Г–∞—В–Њ—А –љ–∞ –∞–≤—В–Њ —Б –Љ–µ—Е–∞–љ–Є–Ї–Њ–є –Є "—Б–≤–Њ–Є–Љ–Є" –Љ–Њ–Ј–≥–∞–Љ–Є
–Ј) –і—А–∞–є–≤–µ—А –Љ–µ–љ—П–µ—В –њ–Њ–ї—П—А–љ–Њ—Б—В—М, —Г–Љ–µ–µ—В –њ–µ—А–µ–Ї–ї—О—З–µ–љ–Є–µ–Љ —Д–∞–Ј —В–Њ—А–Љ–Њ–Ј–Є—В—М –і–≤–Є–≥–∞—В–µ–ї—М
—Б–њ–∞—Б–Є–±–Њ –Ј–∞ –∞–Ї—В–Є–≤–љ–Њ–µ —Г—З–∞—Б—В–Є–µ.
–Т–Њ—В –Ј–∞–Љ–µ—А—Л —В–Њ–Ї–∞ –њ—А–Є –Є–Ј–Љ–µ–љ–µ–љ–Є–Є —Б–Ї–Њ—А–Њ—Б—В–Є –Є –≤—А–µ–Љ–µ–љ–Є:
Speed=127; Milliamps=600; Time_msec=0
Speed=127; Milliamps=14850; Time_msec=7
Speed=119; Milliamps=11850; Time_msec=13
Speed=108; Milliamps=11700; Time_msec=20
Speed=97; Milliamps=12150; Time_msec=26
Speed=85; Milliamps=11250; Time_msec=32
Speed=71; Milliamps=10200; Time_msec=39
Speed=53; Milliamps=9750; Time_msec=46
Speed=32; Milliamps=6300; Time_msec=54
–°–Ї–Њ—А–Њ—Б—В—М –Ј–∞–і–∞–µ—В—Б—П –і—А–∞–є–≤–µ—А–Њ–Љ –≤ –њ—А–µ–і–µ–ї–∞—Е 0...127.
–Ь–Њ–є –∞–ї–≥–Њ—А–Є—В–Љ —В–∞–Ї–Њ–є:
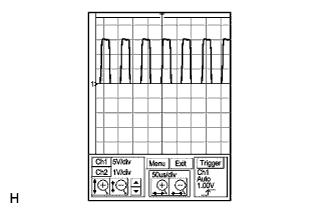
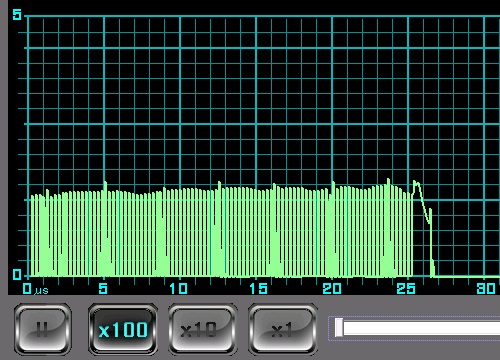
–Я—А–Є —Б—В–∞—А—В–µ –Ј–∞–і–∞–µ–Љ –Љ–∞–Ї—Б–Є–Љ–∞–ї—М–љ—Г—О —Б–Ї–Њ—А–Њ—Б—В—М (127) - –Њ—В—Б—О–і–∞ –њ–µ—А–≤—Л–є —Д—А–Њ–љ—В (–∞).
–Т –њ—А–Њ—Ж–µ—Б—Б–µ –њ—А–Є–±–ї–Є–ґ–µ–љ–Є—П –Ї –љ—Г–ґ–љ–Њ–Љ—Г –њ–Њ–ї–Њ–ґ–µ–љ–Є—О (–њ–Њ –і–∞—В—З–Є–Ї—Г) —Б–Ї–Њ—А–Њ—Б—В—М —Б–љ–Є–ґ–∞–µ–Љ –і–Њ 0.
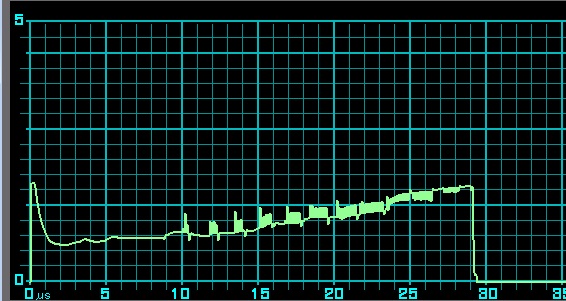
–Ф–∞–ї–µ–µ —В–Њ—А–Љ–Њ–Ј–Є–Љ - –Њ—В—Б—О–і–∞ –≤—В–Њ—А–Њ–є —Д—А–Њ–љ—В (b).
–Я—А–Њ–±–ї–µ–Љ–∞ –≤ —В–Њ–Љ, —З—В–Њ –Є–љ–Њ–≥–і–∞ –Ї–Њ–љ–µ—З–љ–Њ–µ –њ–Њ–ї–Њ–ґ–µ–љ–Є–µ –њ—А–Њ—Б–Ї–∞–Ї–Є–≤–∞—О, –Њ—Б–Њ–±–µ–љ–љ–Њ –µ—Б–ї–Є –∞–Ї—В—Г–∞—В–Њ—А –Њ—Б—М—О –≤–≤–µ—А—Е –њ–Њ–≤–µ—А–љ—Г—В—М ( —В.–µ. –і–µ–є—Б—В–≤—Г–µ—В —Б–Є–ї–∞ —В—П–ґ–µ—Б—В–Є –љ–∞ –њ–Њ–ї–Ј—Г–љ):
VIDEO –Т—Л–љ—Г–ґ–і–µ–љ –≤–Ї–ї—О—З–∞—В—М —А–µ–≤–µ—А—Б –Є –Њ—В—Б–Ї–∞–Ї–Є–≤–∞—В—М –љ–∞–Ј–∞–і.
–Ю–±—А–∞—В–Є–ї—Б—П –Ї —А–∞–Ј—А–∞–±–Њ—В—З–Є–Ї–∞–Љ –і—А–∞–є–≤–µ—А–∞:
–Ю–љ–Є –Њ—В–≤–µ—В–Є–ї–Є:
–¶–Є—В–∞—В–∞:
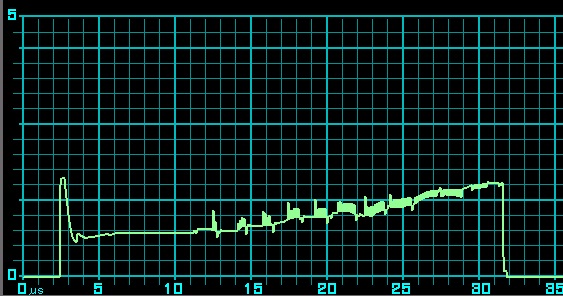
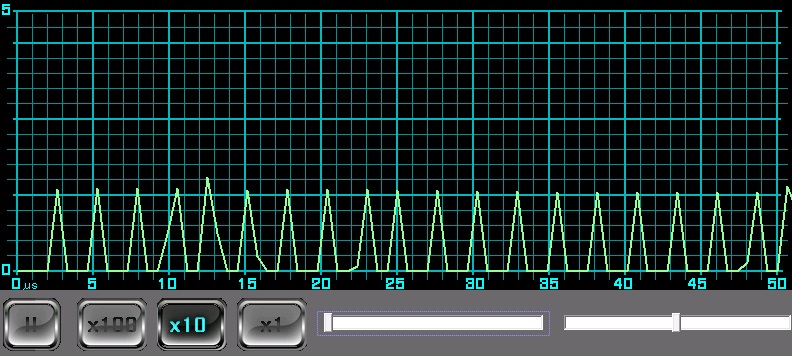
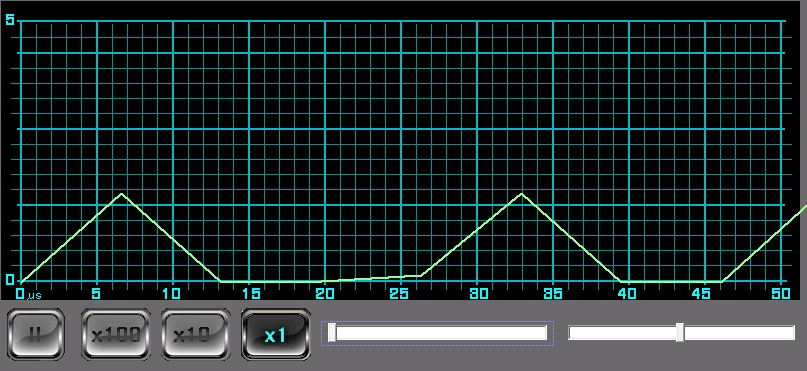
–І—В–Њ–±—Л –њ–Њ–ї—Г—З–Є—В—М –≤—Л—Б–Њ–Ї–Є–є —В–Њ–Ї –љ–∞ –≤—Л—Е–Њ–і–µ: –ї—Г—З—И–µ –≤—Б–µ–≥–Њ –±—Л–ї–Њ –±—Л —Г—Б—В–∞–љ–Њ–≤–Є—В—М —З–∞—Б—В–Њ—В—Г –®–Ш–Ь –і–Њ 9,8 –Ї–У—Ж –Є –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞—В—М 50% —А–∞–±–Њ—З–µ–≥–Њ —Ж–Є–Ї–ї–∞ (–њ—Г—В–µ–Љ —Г—Б—В–∞–љ–Њ–≤–Ї–Є —Б–Ї–Њ—А–Њ—Б—В–Є —А–∞–≤–љ–Њ–є –њ–Њ–ї–Њ–≤–Є–љ–µ –Љ–∞–Ї—Б–Є–Љ–∞–ї—М–љ–Њ–є). –≠—В–Њ –і–∞—Б—В –Њ–Ї–Њ–ї–Њ 51 –Љ–Є–Ї—А–Њ—Б–µ–Ї—Г–љ–і –і–ї–Є—В–µ–ї—М–љ–Њ—Б—В–Є –Є–Љ–њ—Г–ї—М—Б–∞.
–°–µ–є—З–∞—Б —П –Є—Б–њ–Њ–ї—М–Ј—Г—О –Љ–∞–Ї—Б–Є–Љ–∞–ї—М–љ—Г—О —З–∞—Б—В–Њ—В—Г 20 –Ї–У—Ж. –Ш–Љ–µ–µ—В –ї–Є —Б–Љ—Л—Б–ї, –≤ —В–Њ–Љ —З—В–Њ –Њ—В–≤–µ—В–Є–ї —А–∞–Ј—А–∞–±–Њ—В—З–Є–Ї? —П –љ–µ —Б–Њ–≤—Б–µ–Љ –њ–Њ–љ—П–ї, –µ—Б–ї–Є —П –њ–Њ–ї—Г—З—Г –±–Њ–ї–µ–µ –≤—Л—Б–Њ–Ї–Є–є —В–Њ–Ї —Н—В–Њ –Ї–Њ–љ–µ—З–љ–Њ —Е–Њ—А–Њ—И–Њ, –љ–Њ —Г–Љ–µ–љ—М—И–Є–≤ —Б–Ї–Њ—А–Њ—Б—В—М —П –њ–Њ—В–µ—А—П—О –Љ–Њ–Љ–µ–љ—В...



 ,
,  ,
, 
 <-
<- 
 ,
, 
{kind=link}
{kind=link}